Systém ATTS
Michael Popule - 29.7.2024
Dnes se budu věnovat jednomu zajímavému systému, který měl premiéru v roce 1996. Jedná se o zařízení, které aktivně řídilo točivý moment mezi koly jedné nápravy. A tím pomáhalo lépe zatáčet. Dnes jsou tyto systémy většinou používány u zadní nápravy. Ale tento byl použit u předního pohonu. A to pouze u jednoho vozidla.
Historie
V osmdesátých letech minulého století automobilka Honda potřebovala pro svou sériovou produkci pohon všech čtyř kol. První „čtyřkolku“ Honda představila v roce 1984 u modelu Civic Shuttle. Jednalo se o přední pohon s mechanicky připojitelným pohonem zadních kol. Poté Honda v roce 1985 uvedla aktivní pohon všech kol pojmenovaný RT4WD (Real Time). U kterého se v případě prokluzu předních kol připojovala náprava zadní pomocí viskózní spojky. Něco podobného co dnes známe například z automobilů vybavenými systémem Haldex. Ale revoluce přišla v roce 1987. Kdy Honda představila upravenou aktivní čtyřkolku pro model Concerto. Nesl název INTRAC (INnovative TRAction Control system) a byl dostupný pouze s protiblokovacím systémem brzd ALB. U tohoto systému nebyla použita pouze jedna spojka mezi přední a zadní nápravou, ale rovnou dvě. Jedna pro každé zadní kolo, které byli umístěné v rozvodovce místo zadního diferenciálu. Při prokluzu přední nápravy se nepřenášel výkon jen na celou zadní nápravu, ale rozděloval se jemněji mezi zadní kola podle rozdílu rychlosti a adheze jednotlivých zadních kol. Jednalo se v té době o velice sofistikovaný pohon. Systém, byl poté dostupný i pro modely Civic v provedení sedan a samozřejmě pro model Shuttle. A právě v té době na základě tohoto pohonu zkoušela automobilka vyvíjet tento systém dále. Zkoušeli prototyp, u kterého vyřadili spojku pro levé kolo a nechali připojený pohon pouze k pravému zadnímu kolu. Při zkouškách na testovacím okruhu ve vývojovém a testovacím centru v Tochigi zjistili, že se automobil krásně stáčí do levotočivé zatáčky. Tento vynikající pocit ze zatáčení odstartoval vývoj aktivní čtyřkolky s vektorováním točivého momentu. To se psal rok 1989. Napřed ale potřebovali demonstrovat tento systém zatím ve voze s pohonem jedné nápravy. A protože Honda byla známá svými dokonale vyladěnými vozy s předním pohonem. Padlo rozhodnutí tímto systémem vybavit model Prelude, který vždy reprezentoval to nejlepší co mohly v té době nabídnout. A tím se dostáváme do roku 1996, kdy byla přestavena nová generace modelu Prelude a také její verze s tímto systémem nazvaným zkratkou ATTS (Active Torque Transfer System). Název tohoto modelu se lišil podle trhu, kde se prodával. V Severní americe byl zvolen název Type SH, v evropě VTi-S a v Japonsku se prodával pod označením Type S. V tomto roce představila podobný systém i jiná automobilka. A to Mitsubishi v modelu Lancer Evo IV, kde tento systém nesl název AYC (Active Jaw Control) a byl použitý na zadní nápravě. Jedná se o konstrukčně podobný systém, ale už zabudovaný do pohonu čtyř kol. Tím trochu předběhly automobilku Honda, které se povedlo představit tento systém v pohonu všech kol až v roce 2004 u modelu Legend čtvrté generace. Ale bylo to alespoň poprvé ve třídě luxusních sedanů.
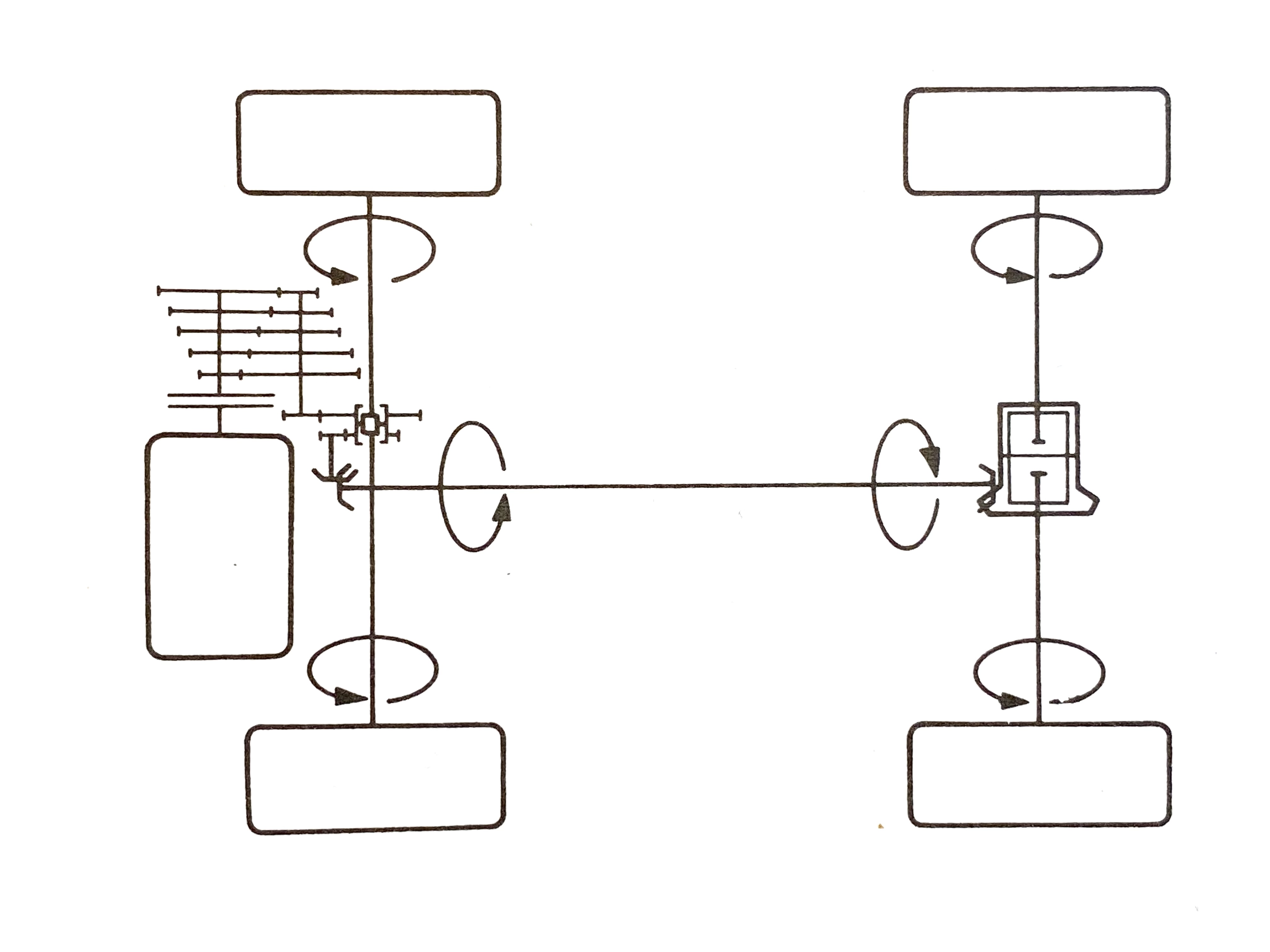
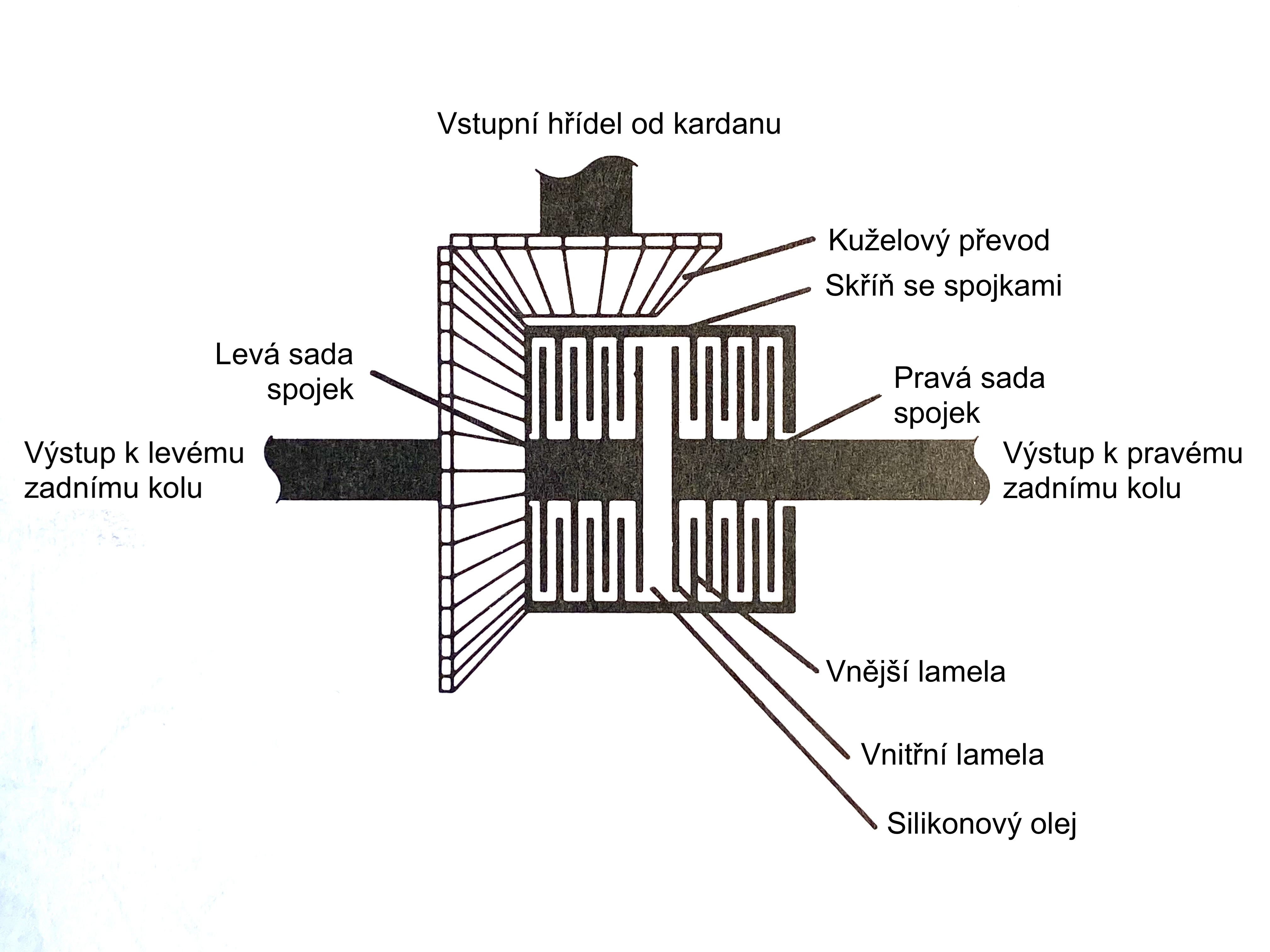
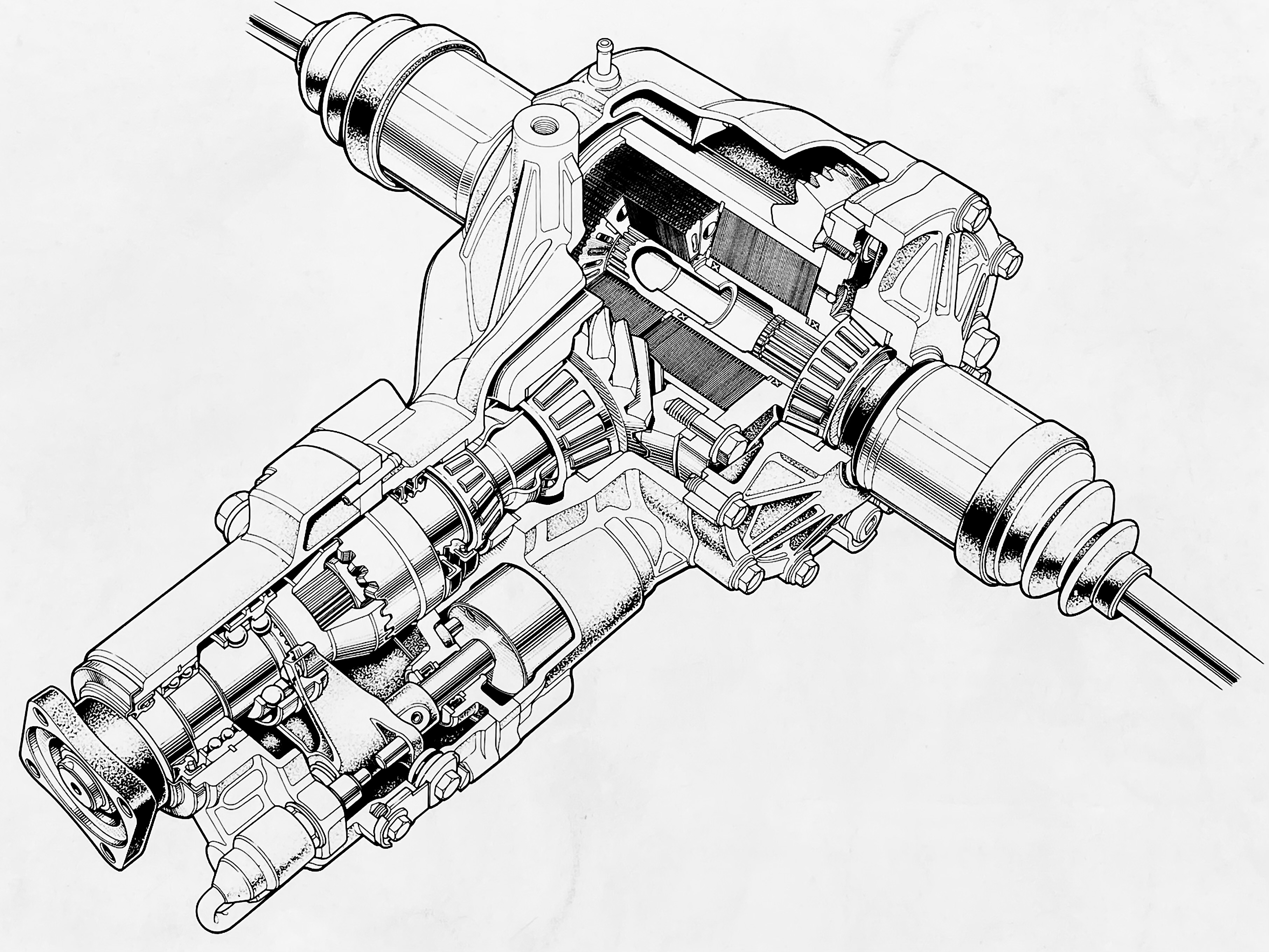
Na obrázcích je vyobrazený aktivní pohon všech kol INTRAC. První zobrazuje schéma celého pohonu. Druhý obrázek potom schéma zadní rozvodovky a třetí průřez touto rozvodovkou. Všiměte si ozubené spojky na vstupu. Sloužila pro náhlé rozpojení pohonu při aktivaci protiblokovacího systému brzd.
K čemu je dobrý systém ATTS?
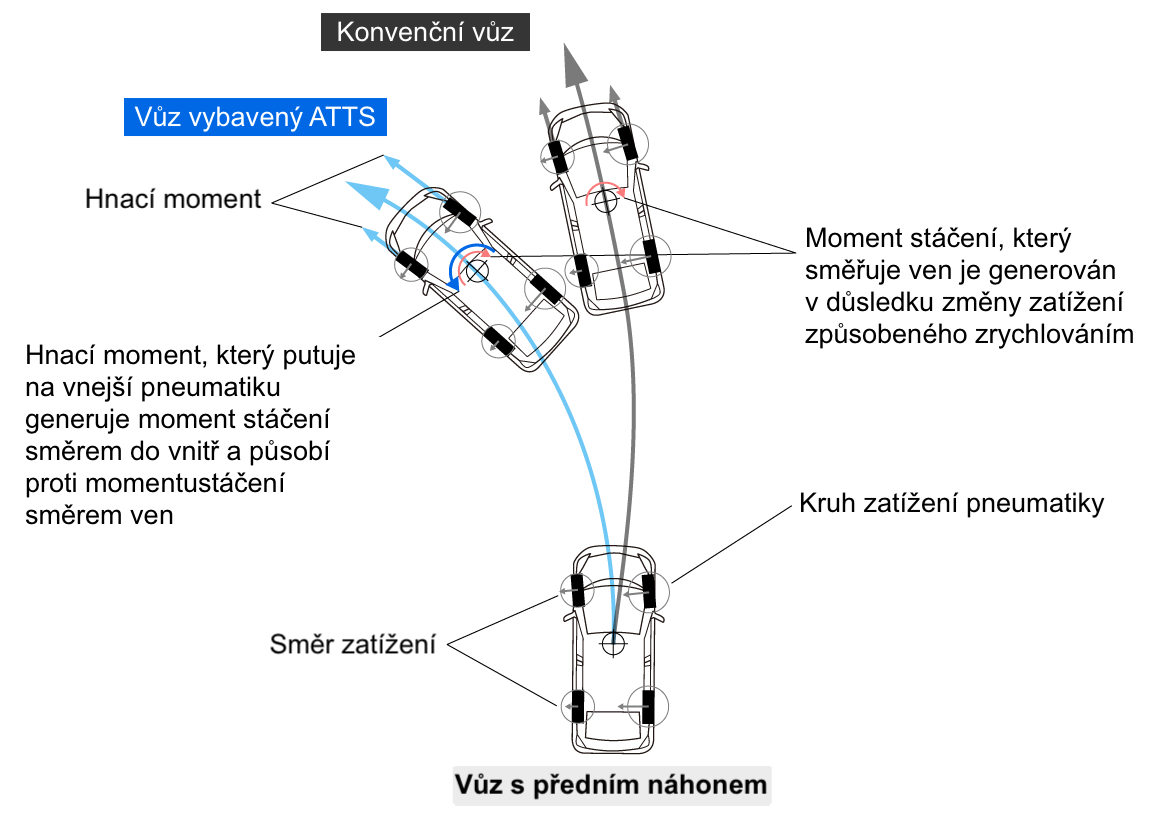
U klasického předního pohonu se většinou používá diferenciál otevřený, který umožňuje aby levé a pravé kolo mohlo mít rozdílnou rychlost při průjezdu zatáčkou. A tím rovnoměrně přenášet výkon na obě kola a neomezovat schopnost volně zatáčet přední nápravě. Jenomže pokud chceme při zatáčení přenést více výkonu a zároveň prudčeji zatáčet, nastává problém. V zatáčce máme díky přenosu hmotnosti více zatížené vnější kolo. To může přenášen výkon na vozovku dobře. Horší je to u vnitřního kola, které vlivem nadlehčení nemůže přenést tolik točivého momentu. Takže se nám může stát, že kolo začne ztrácet adhezi. V tu chvíli tomuto kolu začne předávat klasický otevřený diferenciál více točivého momentu a ztrácíme tím možnost přenést výkon motoru na silnici. U sportovněji stavěných automobilů se to většinou řeší použitím samosvorného diferenciálu. A to buď mechanickým nebo s elektronickým řízením svornosti. Který svojí činností v zatáčce úmyslně spojuje levé a pravé kolo a tím eliminuje nevýhodu otevřeného diferenciálu a umožňuje posílat více výkonu na vnější více zatížené kolo. Ale pokud chceme aby auto dokázalo projet zatáčkou rychleji, musíme výkon záměrně posílat k vnějšímu poháněnému kolu. A to nejen přímým spojením ale i urychlením vůči druhému vnitřnímu kolu. Tím vytváříme stáčivý moment, který automobil pomáhá stáčet se do zatáčky. A to už vyžaduje složitější konstrukci a řízení elektronikou. Při přímé jízdě se chová systém obdobně jako klasický otevřený diferenciál a rozdělení točivého momentu je 50:50. ATTS dokáže tento poměr v zatáčce plynule měnit až na 80:20 ve prospěch vnějšího kola. To umožňuje aby se auto do zatáčky stáčelo lépe a eliminuje to přirozenou nedotáčivost. Dokonce tak, že nemusí řidič ani tolik natáčet volant do zatáčky. A to až o 10 až 30%. Tento systém má tak pozitivní účinek na zatáčení, že je zanedbatelná i přidaná hmotnost celého systému na přední nápravě cca. 20 kg. Na obrázku níže je vyobrazen stáčivý efekt při zatáčení automobilu u vozidla s předním náhonem. Modře je vyznačený automobil se systémem ATTS. Šedý bez systému ATTS.
Popis konstrukce a činnosti
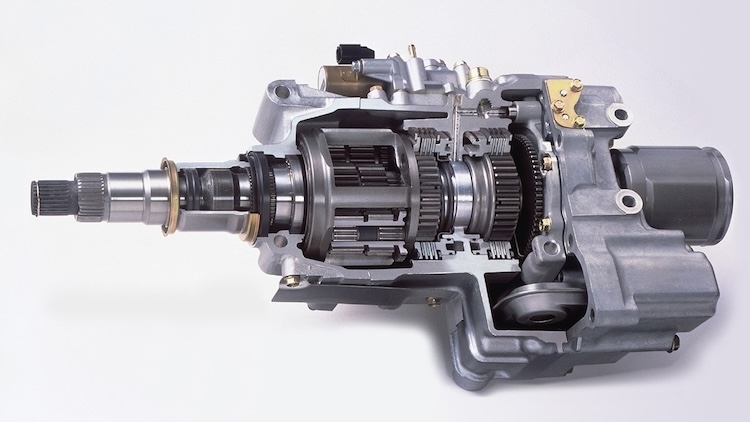
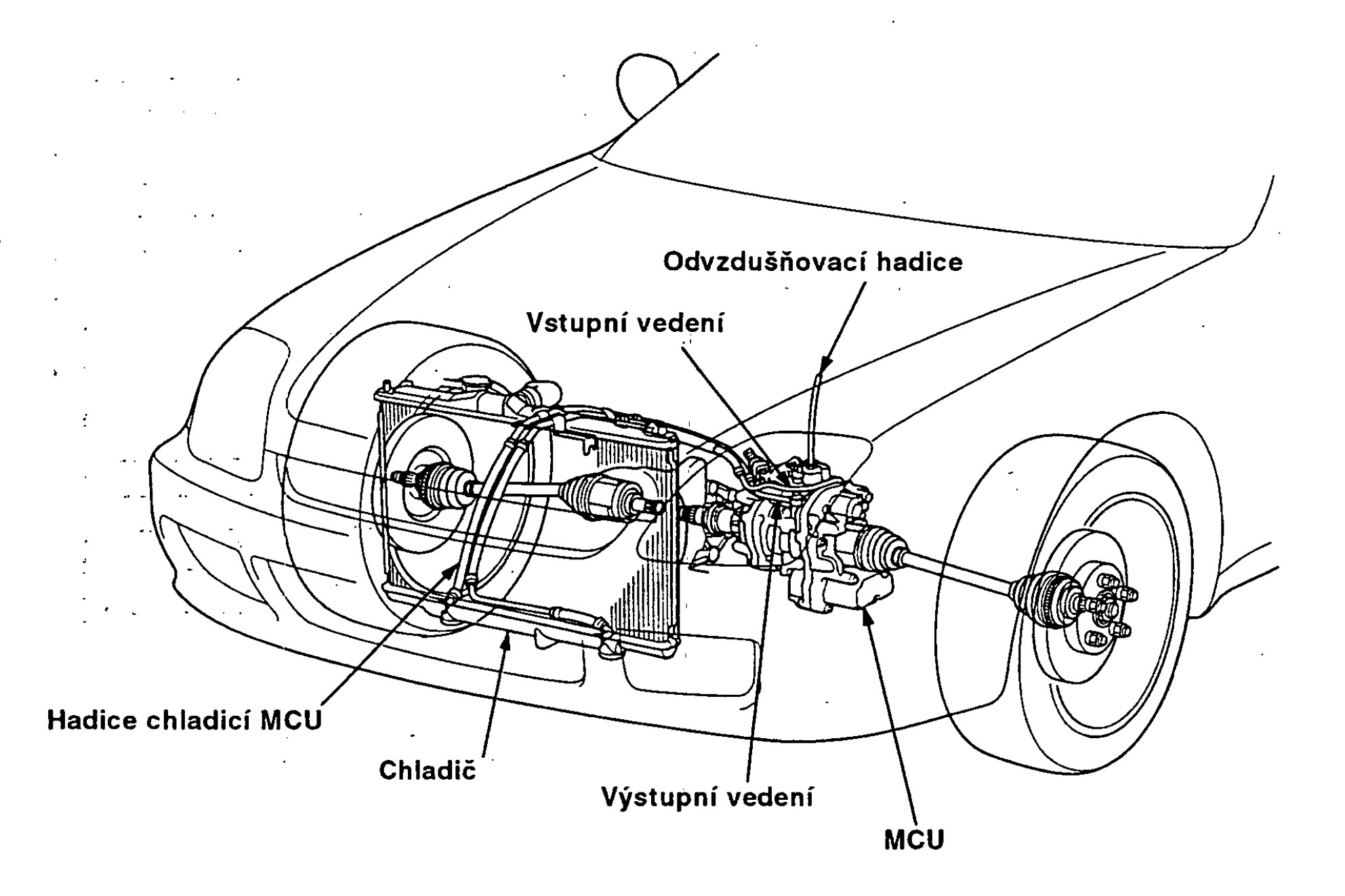
Jednotka ATTS je umístěná vedle převodovky za motorem. Je na místě, kde se u klasického pohonu nachází osa vedoucí od převodovky k levé poloose. Systém je velice kompaktní a nevyžaduje velké zásahy do konstrukce vozidla. Umísťění ve vozidle zobrazuje obrázek níže, kde je jednotka značená MCU.
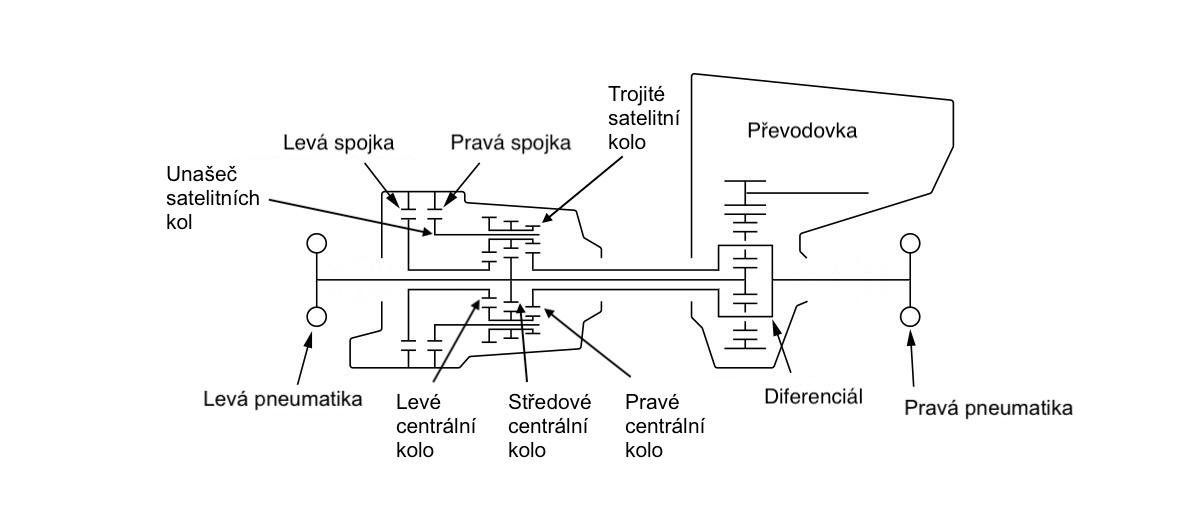
Základem konstrukce systému ATTS je planetová převodovka se dvěmi brzdícími spojkami. Která je připojená na diferenciál umístěný klasicky v převodovce. Ale kvůli lepší napojitelnosti k jednotce a plynulejšímu fungování je diferenciál planetového typu a ne běžně používaného kuželového. Středem systému vede osa, která propojuje diferenciál s výstupem na levou poloosu. Na jedné straně je připojená k středovému centrálnímu kolu diferenciálu a na druhé straně k levé poloose. V planetové převodovce je napojena na středové centrální kolo. Tuto osu obaluje oddělená druhá dutá osa, která je v planetové převodovce připojená k pravému centrálnímu kolu a na druhé straně ke unašeči plaketový kol v diferenciálu. Na tento unašeč je napojená na pravé straně osa k výstupu k pravé poloose. To znamená, že do planetové převodovky jsou zapojeny obě dvě strany výstupu diferenciálu. Pohánějící levé a pravé kolo. V planetové převodovce je ještě jedno levé centrální kolo připojené k levé spojce systému. Na tyto tři centrální kola přímo navazují trojitá propojená satelitní kola, točící se volně na osách umístěných v unašeči, který je napojený na pravou spojku systému. Obě tyto spojky jsou vlastně brzdy, které jsou druhou sadou spojek jsou připojeny na pevno k převodové skříni systému. Kdy právě levá spojka přidržuje levé centrální kolo a pravá spojka koš planetové převodovky. Díky této planetové soustavě nejsou spojky tolik namáhány a spolu s chlazením oleje to zaručuje dlouhou životnost systému. Pokud není ani jedna ze spojek aktivní, tak se tyto části planetové převodovky volně otáčí a neomezují základní funkci diferenciálu. Tím je zaručena jeho normální funkce při poruše systému. Spojky jsou ovládány plynule a podle potřeby prokluzují. Vždy může být ovládána pouze jedna spojka. A to buď levá nebo pravá. Nikdy současně. Převod obou dvou převodů planetové převodovky je při maximálním zabrzdění spojek asi 1:15. Na obrázku níže je zobrazeno schéma převodů s popisem jednotlivých součástí.
Režimy fungování
Systém funguje ve třech základních režimech. Při přímé jízdě nebo při mírném zatáčení při mírné potřebě výkonu systém není aktivní. Pak tu máme další dva režimy, kde už aktivní systém je. A to jízda v levotočivé zatáčce a v pravotočivé. V následujících třech odstavcích je popsáno a znázorněno fungovaní v jednotlivých režimech.
Přímá jízda
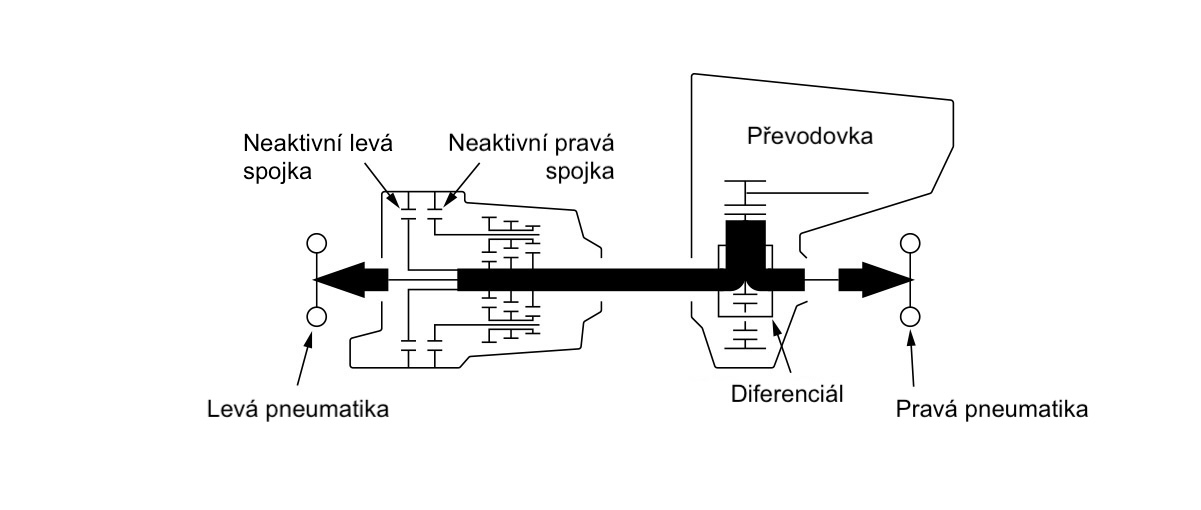
Následující obrázek ukazuje stav při přímé jízdě, kdy není aktivovaná žádná ze dvou spojek. Točivý moment znázorněný dvěma černými šipkami putuje rovnoměrně jak k levému kolu tak k pravému. Jako u klasického pohonu. Také když vozidlo jede mírnou zatáčkou a není potřeba aktivně přenášet točivý moment.
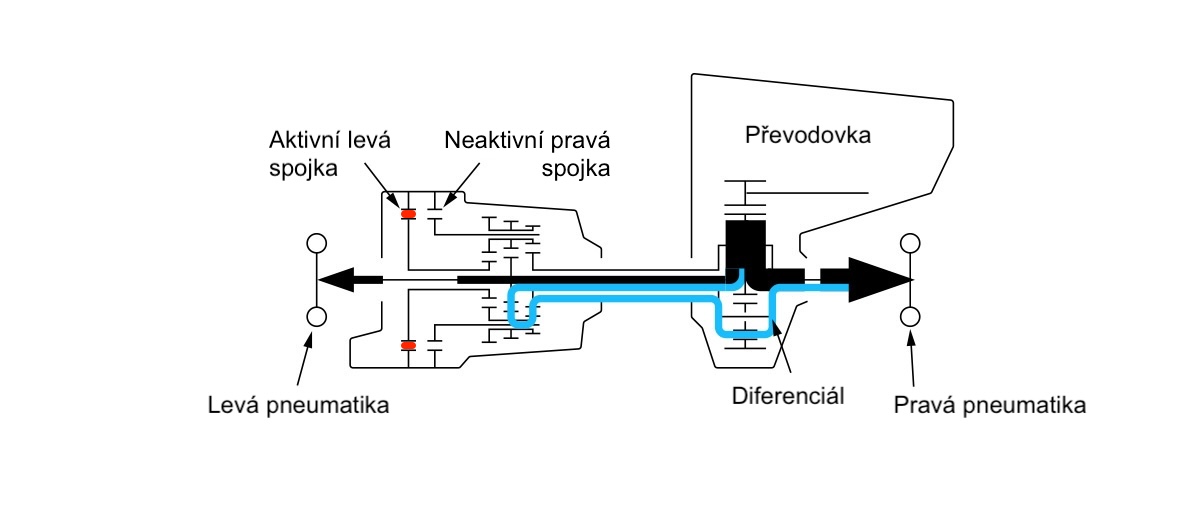
Jízda v levotočivé zatáčce
V levotočivé zatáčce aktivuje systém podle potřeby levou spojku a tím přibržďuje zmíněné levé centrální kolo planetové převodovky. Tím nutí, aby se satelitní kola otáčeli spolu s unašečem okolo tohoto kola a tím vytvářeli převod mezi středním a pravým centrálním kolem a tím i mezi pravým a levým kolem. Pravé se otáčí rychleji než centrální středové kolo. A přenáší tím nuceně točivý moment k pravému kolu. Jako je vidět na obrázku níže.
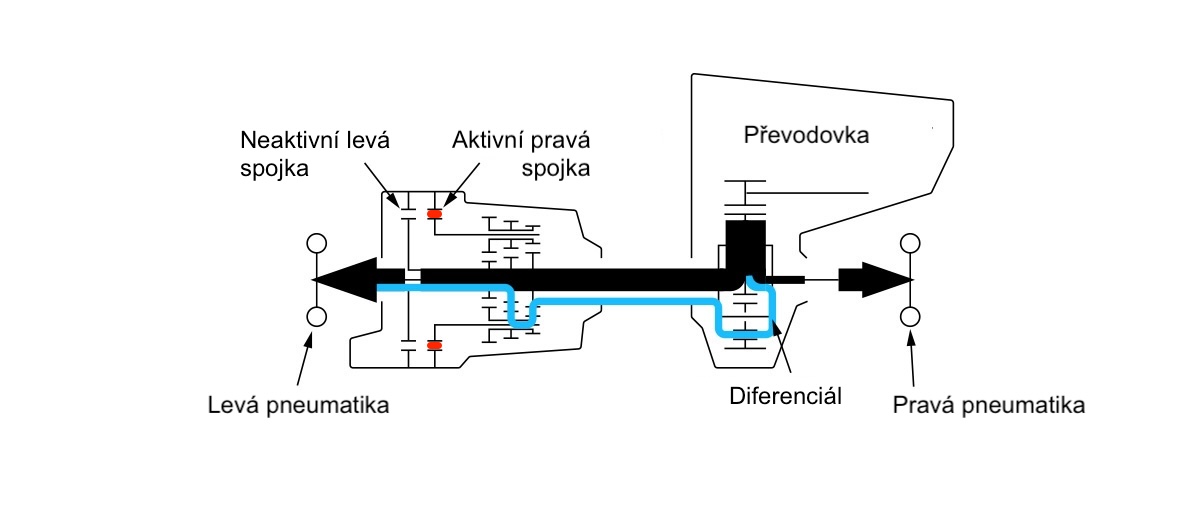
Jízda v pravotočivé zatáčce
V pravotočivé zatáčce systém aktivuje podle potřeby pravou spojku a tím přibržďuje unašeč satelitních kol. Tím, že se unašeč přibržďuje. Roztáčí se satelitní kola, která díky rozdílným rozměrům vytváří převod mezi středním a pravým centrálním kolem. Tento převod nuceně roztáčí větší rychlostí centrální levé kolo planetové převodovky a tím i levé kolo. Tok energie je vidět na obrázku níže.
Režim prudkého ubrání plynu
Pak je tu ještě jedna funkce systému. Protože tah výkonu, který systém vytváří v zatáčce může při prudkém ubrání plynu způsobit rozhození stability vozidla. Systém v tomto případě okamžitě přehodí tah kol na opačnou stranu, než je potřeba při normální jízdě pod plynem. To znamená, že pokud je v levotočivé zatáčce aktivní levá spojka a výkon putuje do pravého kola. Systém tuto spojku rozpojí a aktivuje druhou. Čímž přenese výkon na vnitřní levé kolo a stabilizuje tím vozidlo.
Ovládání spojek
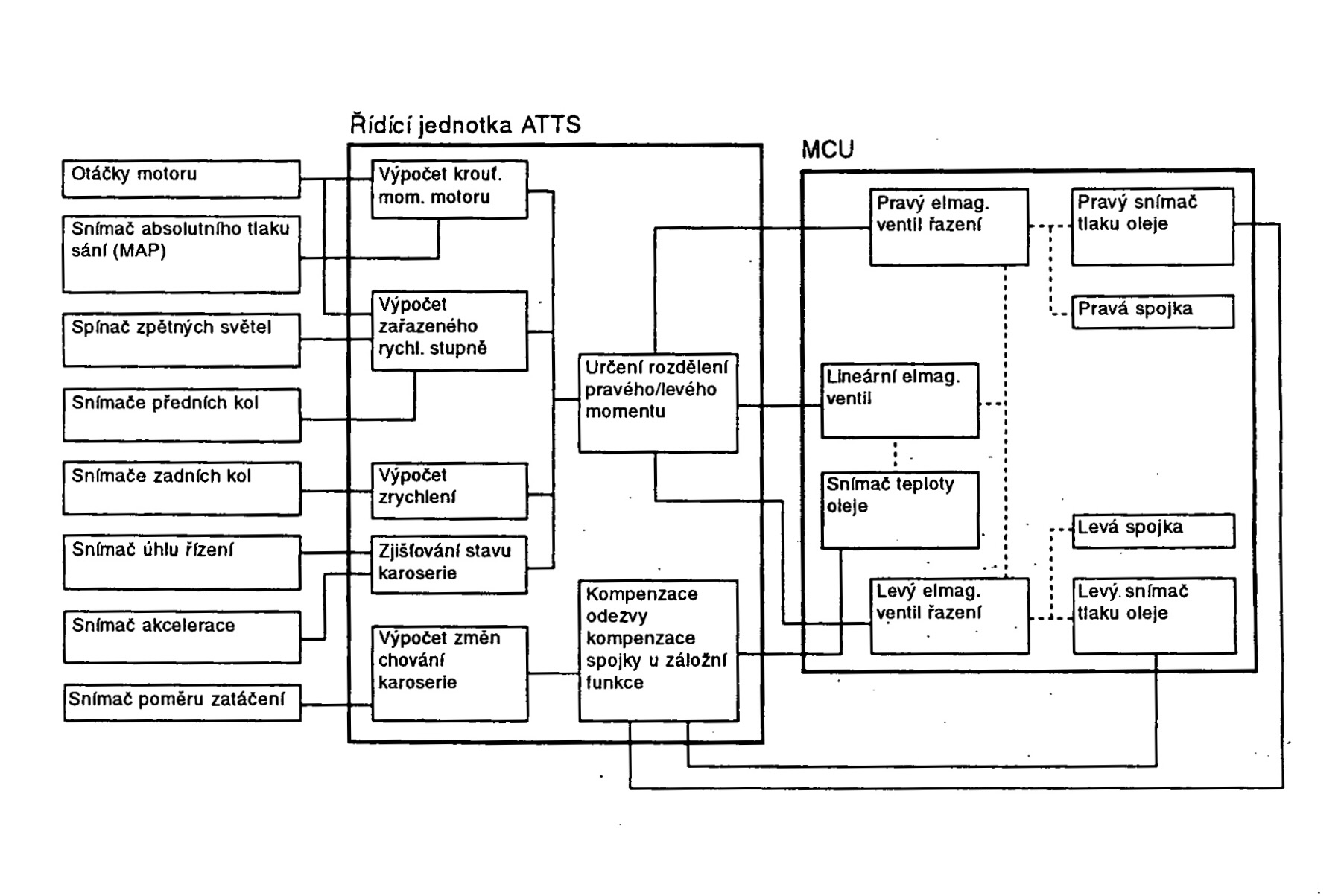
Spojky jsou ovládány hydraulicky dvěma eletrohydraulickými ventily. Každý pro jednu spojku. Ty pouze přivádí tlak oleje ke spojce. Podle toho jakou spojku řídicí jednotka spíná. Ale protože systém potřebuje plynulou regulaci spojek. Je před těmito ventily jeden společný, který už může jednotka ovládat plynule. Tím i plynule ovládat tlak působící na spojku. Tlak je do tohoto ventilu dodáván od tlakového čerpadla, které saje olej z vany umístěné pod spojkami. Ale tím, že spojky jsou při používaní zahřívány, musí se tento hydraulický olej chladit. A to tím, že je veden olej z čerpadla vedením do spodní části chladiče motoru, kde se nachází výměník tepla. Což je vidět na obrázku, kde je znázorněné základní rozvržení komponentů. Přebytečný olej ze spojek stéká zpět do vany. Pak tu mámě ještě elektronickou řídící část. Jejím základem je řídící jednotka, která potřebuje pro výpočet míry sepnutí jednotlivých hydraulických spojek více informací. Základem jsou údaje z čidel jednotky ABS, ze kterých vyčte rychlost všech čtyř kol. Potom míru sešlápnutí plynového pedálu, informace o aktuálním výkonu z řídicí jednotky motoru, poloha natočení volantu a pohyby karoserie ze snímače akcelerace, ze kterého zjišťuje jednotka míru stáčení vozidla kolem svislé osy vozidla. Na základě těchto informací jednotka vypočítává míru sepnutí spojek a tím i míru přeneseného momentu na kole. Na obrázku níže je základní schéma komunikace a řízení systému ATTS. Samotná mechanická část je značena jako MCU.
Závěr
Tento systém byl na svoji dobu velice pokrokový. Možná až zbytečně komplikovaný na automobil s předním pohonem. Ale Honda potřebovala někde demonstrovat tento systém a hlavně to byl předvoj pro systém aktivního pohonu všech kol. Dnes se tyto systémy používají většinou na zadní nápravě a to zejména u dražších sportovněji laděných vozidel. U dnešních moderních vozů s předním náhonem se používá přibržďování vnitřního kola brzdou. I když to není to samé, účinek je podobný, i když ne tak účinný. A to nemluvíme o zbytečném namáhání brzd. Jako třeba systém XDS u výrobce Volswagen nebo AHA u Hondy. Je to možné díky dnes už pokrokovým jednotkám ABS, které už dokáží jemněji ovládat brzdný tlak na jednotlivých kolech. Jsem rád, že takové zajímavé systémy vznikali. Bez toho by nebyl pokrok ve vývoji v jiných systémech. Někdy příště si popíšeme podobný systém u zmíněného Mitsubishi Lancer EVO, který už byl úspěšnější a pomohl těmto autům k velké oblíbenosti.
Zdroje: Honda, archiv autora